


























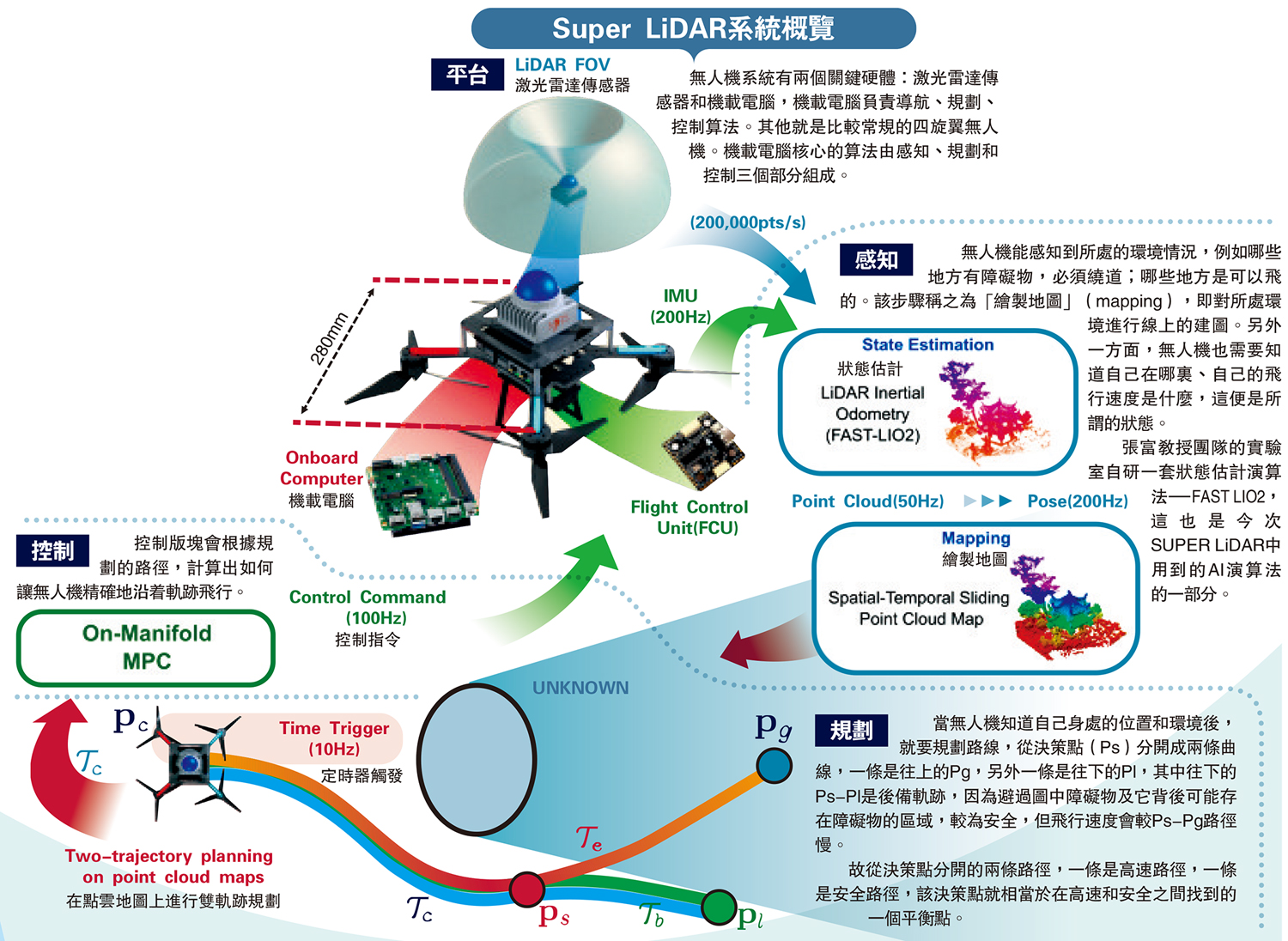
平台
無人機系統有兩個關鍵硬體:激光雷達傳感器和機載電腦,機載電腦負責導航、規劃、控制算法。其他就是比較常規的四旋翼無人機。機載電腦核心的算法由感知、規劃和控制三個部分組成。
感知
無人機能感知到所處的環境情況,例如哪些地方有障礙物,必須繞道;哪些地方是可以飛的。該步驟稱之為「繪製地圖」(mapping),即對所處環境進行線上的建圖。另外一方面,無人機也需要知道自己在哪裏、自己的飛行速度是什麼,這便是所謂的狀態。
張富教授團隊的實驗室自研一套狀態估計演算法 — FAST LIO2,這也是今次SUPER LiDAR中用到的AI演算法的一部分。
控制
控制版塊會根據規劃的路徑,計算出如何讓無人機精確地沿着軌跡飛行。
規劃
當無人機知道自己身處的位置和環境後,就要規劃路線,從決策點(Ps)分開成兩條曲線,一條是往上的Pg,另外一條是往下的Pl,其中往下的Ps-Pl是後備軌跡,因為避過圖中障礙物及它背後可能存在障礙物的區域,較為安全,但飛行速度會較Ps-Pg路徑慢。
故從決策點分開的兩條路徑,一條是高速路徑,一條是安全路徑,該決策點就相當於在高速和安全之間找到的一個平衡點。






評論
查看更多評論>>
加載中……


熱榜










